鉴智机器人所推出的双目智驾体系,兼具差异化和性价比优势,为当时自动驾驭所面临的问题供给了愈加本质和立异的解决思路。
2023年注定是充溢改变与改造的一年。年头特斯拉大降价引发职业巨震,而后国内重新势力车企到3月份的燃油车降价潮,都在进一步检测着整车成本,职业性价比比拼进入要害期;与此同时,随着奔驰根据前向双目的Drive Pilot率先落地L3级自动驾驭,智能驾驭加速“进阶”,高阶智能驾驭的快速落地也迎来要害节点。
相关热点新闻背面,是智能汽车全体的趋势:汽车硬件成本会越来越廉价,智能软件的价格越来越贵。
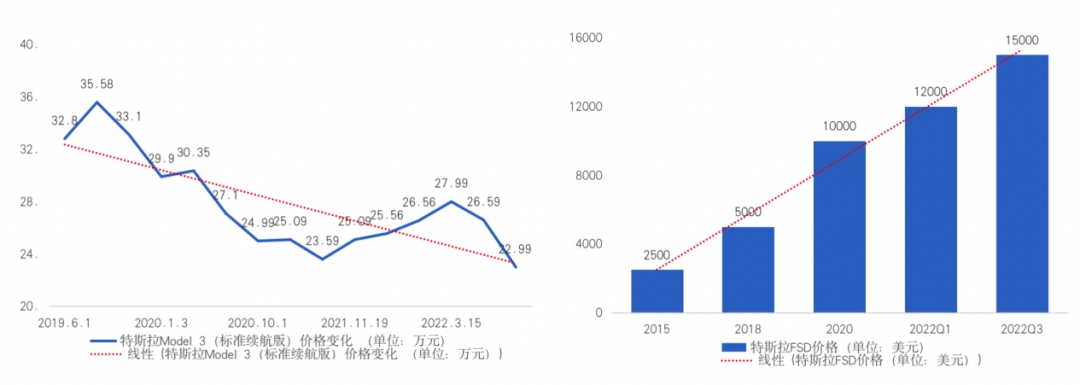
「特斯拉硬件与软件价格趋势对比」 图源:鉴智机器人
在这种背景下,行业必须思考:什么计划能支撑智驾持续发展,以更具性价比的方式,完成功用更优、功用更可靠的智驾?
一个中心破局思路在传感器端。行业需要装备安稳,信息涵载齐备,能够大规模量产的传感器装备计划。
相比其他传感器,视觉传感器具有信息涵载齐备、硬件成本低的固有优势,但其信息为间接表明,对算法和算力的发掘要求极高,这既是行业难点、也是技术壁垒。
2023年3月23-24日,在2023光谷人工智能产业生态大会——智能网联轿车专场,鉴智机器人联合创始人兼CTO都大龙表明,根据这一洞悉,鉴智机器人自成立伊始,以终为始,经过根据AI算法与视觉传感器的软硬协同优化,构建以视觉3D理解为中心的智能驾驶体系“双目立体视觉智能驾驶体系”,为车企提供高功用、高性价比、极具差异性的体系计划,满意车企在智能化下半场的综合诉求。

都大龙 | 鉴智机器人联合创始人兼CTO

图源:鉴智机器人
比照单目,双目立体视觉传感是生物学亿年进化并最终与实际国际自洽的结果。左/右目投影成像与视差之间构建了一种自监督的束缚形式,使之能与物理国际的三维信息相关,并持续自适应学习,从而赋能机器人与自动驾驶在实际国际中自如活动的能力。双目立体视觉比照单目还有以下严重优势:
双目立体视觉对实际国际的感知,具有物理学定律支持的真3D信息提取能力。
人和动物之所以能产生立体的感知,本质上是因为左/右目或不同时间对同一物体看到的图画有所差异,这种差异以视差进行描述,而视差根据三角测量原理即可得到深度。因为视差获取是通过左/右目图画的差异核算的,仅与图画像素级的类似度有关,并不依靠高层语义信息,因此可以直接解决当时自动驾驶“先识别再检测”(非标障碍物检测)的问题,可以处理非标物体和路况。与传统根据启发式规矩核算左/右目图画匹配以获取视差的方法不同,鉴智机器人选用根据学习的AI对左/右目以及时序图画进行时空匹配,不仅大大提升了3D/4D感知的功能,而且能够以数据驱动的方法不断学习进化。
数据闭环是自动驾驶的发动机,双目立体视觉能够大大提高自动驾驶3D/4D数据闭环的功能和功率。
为了处理自动驾驶多传感器后交融后处理所面临的语义了解天花板问题,即通过启发式规矩对不同传感器的感知结果进行交融,难以处理相似大车切断等问题,业内提出了基于学习的端到端bev 3D/4D感知方案,将启发式规矩用AI学习的方法替代,然后大大提高了自动驾驶语义了解的天花板。但一起也对数据闭环真值系统提出了更高的要求,即3D/4D感知系统所需要的真值获取本钱往往是十分高的,距离、速度、光流、场景流等信息人工难以标示。依靠激光雷达进行3D/4D真值获取的方法不仅与视觉难以自洽,而且难以处理数采与量产的距离(量产车型绝大多数并不装备激光雷达)。双目立体视觉因为具备更精准、更稳定、泛化才能更强的稠密3D描绘信息,能够以更低的门槛、更高的功率构建更高精度的3D/4D重建,然后得以构建更高效能和功率的3D/4D数据闭环系统。
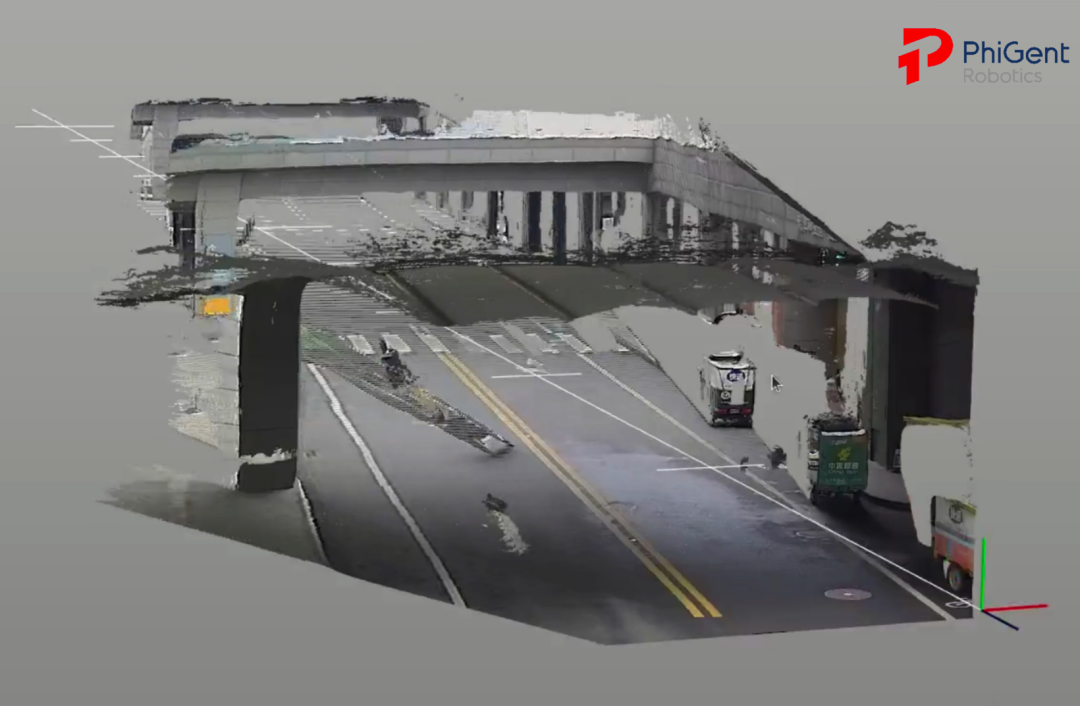
「鉴智机器人双目智驾系统输出的4D重建效果」图源:鉴智机器人
02双目智驾系统有何技术门槛?
当前,双目立体视觉已从最初的“小众路线”走向大众:2021年起前装搭载车型便不断增加,从多为豪华品牌车型到如今成为越来越多自主品牌新车的“标配”:诸如吉利领克009、北汽极狐阿尔法S、五菱Kiwi等车型,均选择双目立体视觉作为前向主传感器。
鉴智机器人通过双目传感器和智能驾驶算法的软硬协同优化,已经显著提升了智能驾驶的智能程度、安全性、舒适性,可以提供极具差异性的智能驾驶功能。与之相应的是,双目智驾系统的实现从硬件到算法再到量产都有着极高的技术门槛:
硬件门槛:车载双目相机需要在整车10年30万公里的生命周期内维持高稳定性,需要光学部件、结构及材料、生产工艺、图像做全栈软硬件协同优化;
性能门槛+算法门槛:在满足车载可布置空间尺寸限制下,通过超分辨率视差计算方案实现百米外的车辆、行人、以及非标障碍物的高精度测距;高帧率、高精度、稠密深度估计,在成本可控的嵌入式计算平台实现产品化;利用AI学习范式解决弱纹理、重复纹理场景视差匹配精度的问题,同时基于数据驱动不断提升时空层面的视差精度;
量产门槛:产线标定方案需要结合相机硬件特性做全栈自研,生产节拍可根据整车生产节拍定制;在线自标定在无真值参考的前提下,能够对模组多自由度的偏差进行校准,保证点云数量和精度符合感知的性能要求。
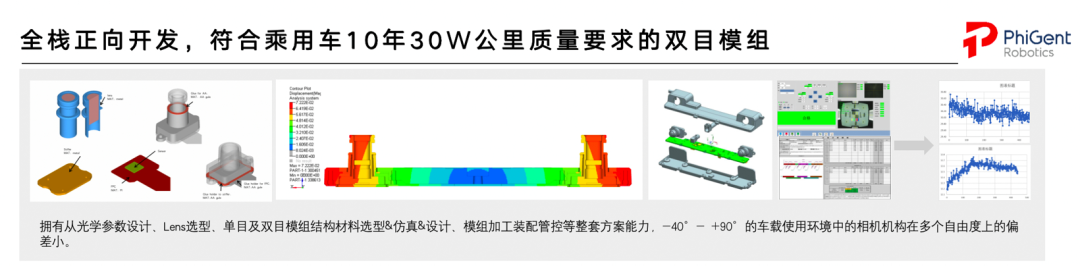
图源:鉴智机器人
鉴智机器人在AI算法、视觉传感器、异构计算等方向都拥有领先的技术积累和实践经验,已经在双目智驾系统方面建立起了软硬结合的技术壁垒。
03
双目智驾系统差异化优势详解
传统的双目立体匹配算法针对弱纹理、反光等区域效果比较差,对物体语义信息利用较少,算法适用范围具有局限性,效果上限明显。鉴智机器人通过贯穿传感器、AI算法的3D视觉理解路线,构建眼脑协同新范式,打造基于AI的双目立体视觉产品,提供高阶智驾前视感知所需的稠密、实时、同步的3D描述信息。
以基于AI的双目立体视觉传感器为核心,鉴智机器人双目智驾系统可以带来以下优势:
【性能优势】高性能上限:基于双目立体视觉的3D感知,实现真正的“事无巨细”3D感知服务于智能驾驶
目标感知优势:通过双目深度估计提供的3D信息降低了视觉感知后处理系统复杂度,得到更精确的3D视觉结果;
针对低纹理非标物体、非训练集目标、进出隧道场景和单目立体盲(车辆或地面印刷物易被检测为交通参与者或设施)等场景,通过双目深度估计能够获取精确的深度信息,可以更好地解决长尾问题。
道路结构感知优势:同样地,双目的深度信息可以更好地得到道路拓扑及可行驶区域,对于非结构化道路路面分隔、大曲率弯道、道路拓扑、坡道场景的识别更准确;同时,稠密的3D描述信息对于路面凹凸场景的高程检测相对比稀疏激光雷达点云检测性能更佳。
在线建图精度优势:双目深度估计可以增强在线局部建图中特征点的准确深度信息,提升在线建图的精度。同时,由于双目立体视觉可以对每一帧图片进行三角化,能够更快地进行地图的初始化和更新,从而具有更好的场景泛化性,可以实现效果更佳的记忆行车及记忆泊车功能。
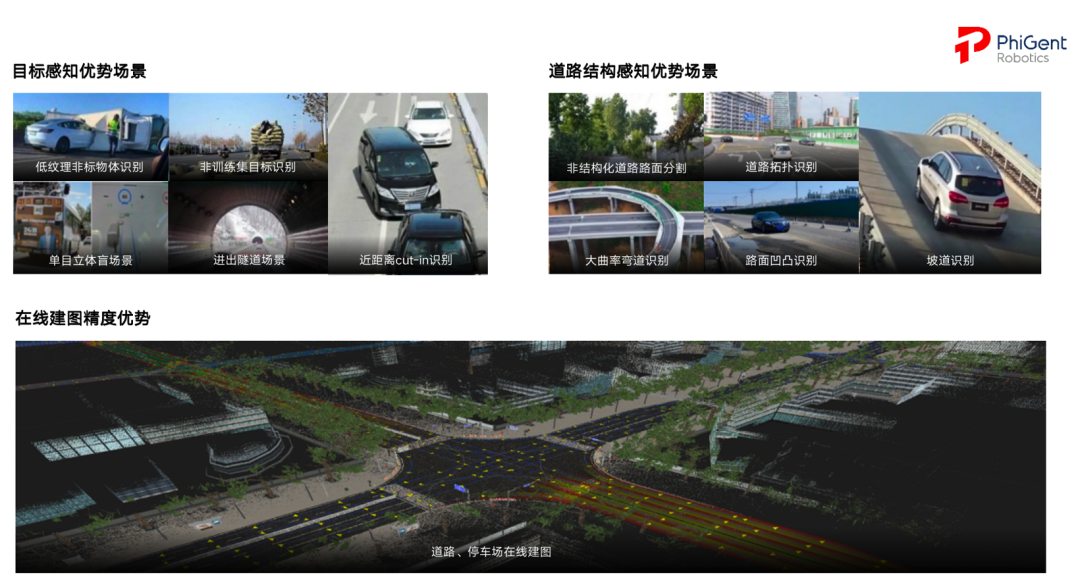
图源:鉴智机器人
【成本优势】极致性价比:大幅降低整车智能化成本,助力车企客户实现竞争优势
传感器本身的低成本:以双目立体视觉产品为主的传感器配置本身成本低,还可以减少传感器数量,有效降低整车成本,相较于激光雷达等方案,呈现一个数量级的成本降低。
传感器复用的低成本:鉴智机器人双目立体视觉产品,除可满足高阶智驾功能外,更可赋能其他智能化应用,如魔毯高程检测、通过性检测等,实现单一传感器的多功能复用,降低整车综合成本。
【体系化优势】系统化效率提升:大幅提升系统能力边界和智驾安全性,打造面向现实世界3D感知的AI数据闭环
面向系统能力边界拓展和安全:鉴智机器人双目立体视觉智驾系统,从入门ADAS到更高阶智驾功能,均能提供“越级式”的系统能力,满足极致性价比的产品需求,实现“一个技术平台,覆盖不同定位车型平台”。同时,其自成一套的冗余感知能力和差异化的3D性能,能更好地从安全角度为自动驾驶场景扩展和等级的提升奠定扎实的基础。
面向3D感知的AI数据闭环:具备稠密的视觉3D描述信息,双目立体视觉成为天然的3D数据开垦机器,可面向大规模的量产交付实现极具规模化效应的视觉3D数据闭环。相较于传统围绕LiDAR建立的数据体系,鉴智机器人双目立体视觉产品助力实现端到端AI数据闭环,可数量级提升数据驱动的数据闭环迭代效率。
04双目智驾系统能实现哪些功能?
鉴智机器人双目智驾系统为城市行车提供全天时、全天候、全类目的主动安全,功能包括主动安全系统、行车功能和双目智驾特色功能三大方面:
主动安全系统:满足Euro-NCAP 2023 要求实现五星标准的主动安全功能之外,同时支持增强型安全功能,包括ELKS(紧急车道保持)、AES (紧急自动转向),ESS (紧急安全停车策略),低速近距离AEB等,以提供全方位的主动安全保障能力;
行车功能:TSR/TLR(交通标识/灯识别及响应)、Pilot (居中巡航辅助驾驶)、NOA( 高速领航辅助驾驶)、DTLC(驾驶员拨杆变道)、ALC(自主变道)、Pilot Junction Assist(路口通行辅助)等。同时该系统支持行车场景体验的进一步拓展,包括后续实现城区领航辅助及低速行车辅助等。
双目智驾特色功能:近距离加塞处理、非标障碍物避让、大曲率弯道居中巡航、路面高程检测、道路拓扑结构构建、可行驶区域检测、高性能记忆行车和记忆泊车等。
这些特色功能均是基于双目3D感知的差异化优势开发而得。比如近距离防加塞功能,单目cut-in控制要检测到车辆目标时才会启动,这需要车身进入视野的部分能够支持车辆被识别到。而双目智驾系统直接利用双目3D信息,在车头刚刚探入时就能够检测到非标障碍物的探入,从而更加及时有效的启动cut-in控制。
再如非标障碍物绕行功能,一般而言,车祸、建筑工地等场景没有清晰的定义,是非标准化场景,单目智驾系统很难做出准确判断,而双目智驾系统可以检测出非常准确的可行驶区域实现绕行,大大提升这些非标场景的处理体验。
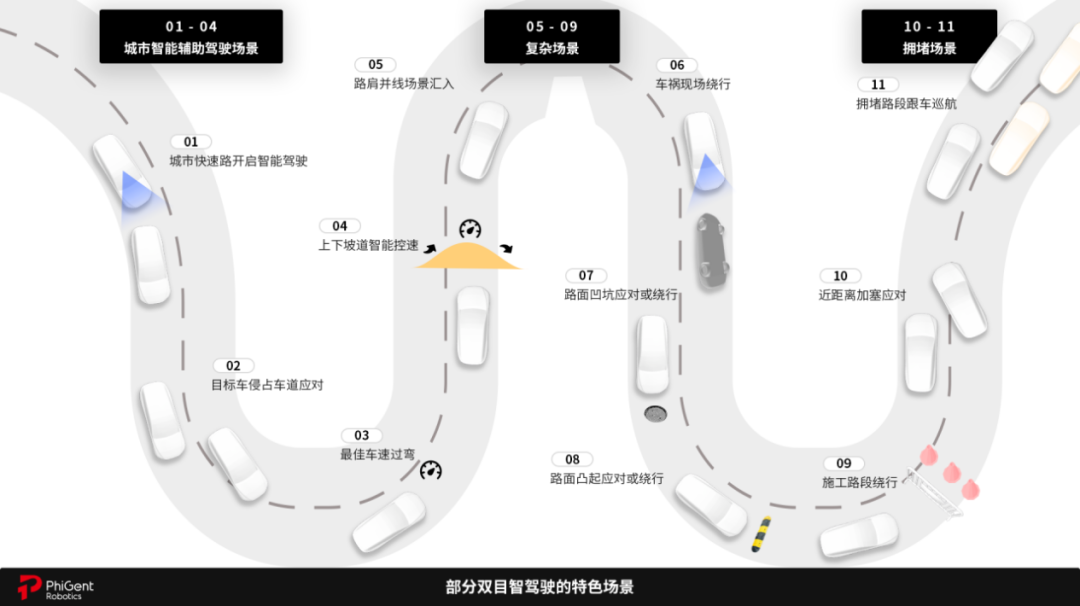
「双目智驾的特色场景功能示意」图源:鉴智机器人
随着用车场景的多样化,面向驾乘舒适性及底盘智能化的需求也在不断添加,双目智驾体系在魔毯悬架、驾驭形式智能调理、窄道可经过性检测等方面的体现同样优异。例如,经过双目预瞄可以精确感知左/右车轮区域的路面凹凸高度信息,合作悬架体系提前调理相关参数,提升驾乘舒适感;再如利用窄道可经过性检测,经过检测可行驶区域宽度,并结合自车宽度判别本车是否可经过,然后提高经过安全性。

鉴智机器人建立以来,已获取包括全栈自动驾驶方案和双目立体视觉产品在内的多个头部主机厂定点项目,目前已涵盖8个车型,其中多个车型现已完结交给,交给总量超25万台。鉴智机器人所推出的双目智驾体系,兼具差异化和性价比优势,为当前自动驾驶所面对的问题供给了愈加实质和创新的处理思路。

200万科技产品

1小时快速报价

100%原装正品

30%成本降低

Copyright©物公基(Wgjpur) All Rights Reserved
沪ICP备15047885号-3







